
дериватива, промене коефицијента
Деривативи стабилности и управљивости дефинишу и условљавају промене облика кретања око равнотежног стања летелице. Скуп свих дериватива стабилности и управљивости (заједно са другим карактеристикама летелице), повезано у једначинама кретања представља математички модел летелице. Ови математички модели се користе у симулаторима лета за инжењерску анализу стабилности и управљивости летелице, а у реалном времену, служе за обуку и тренажу пилота.
У инжењерској пракси, деривативи стабилности и управљивости се деле у три групације:
- деривативи положаја (статички, по нападном углу α и углу клизања β),
- пригушни деривативи (динамички, по угаоној брзини, око оса летелице q, r и p) и
- унакрсни деривативи („купловани“, утицај клизања на ваљање летелице и обрнуто).
Физикалност

Аналитичка дефиниција стабилности и управљивости се заснива на систему линеарних једначина, које представљају равнотежно стање летелице. У једначинама се приказују силе и моменти у облику збира производа њихових градијената по одређеном параметру и прираштаја тога параметра. Ови градијенти у бездимензионом облику представљају деривативе стабилности и управљивости. Пошто је авион симетричан, у односу на вертикалну раван, у којој се налази и уздужна оса, сасвим се одвојено анализирају једначине уздужне стабилности од попречно-смерне.
Стабилност и управљивост летелице су неодвојиви појмови, те и сви деривативи имају утицај на те обе области повезане проблематике. Многи, са мањим утицајем се занемарују, а доминантнији се укључују у разматрање.
У уздужном кретању
![]() За више информација видите чланак Аеродинамика .
За више информација видите чланак Аеродинамика .
Уздужна стабилност и управљивост произилази из услова равнотеже дуж оса „X“ и „Z“ и око „Y“, из практичних разлога, разматрано у координатном систему лета (брзинском). У томе покретном систему, поклапа се „X“ оса и правац кретања летелице. Математички приказ тих равнотежних стања су линерне једначине, које садрже деривативе стабилности, као градијенте по одређеном параметру лета.
Једначине равнотеже:![]()
 – прираст узгона по нападном углу (градијент узгона)
– прираст узгона по нападном углу (градијент узгона) – прираст момента пропињања по нападном углу, мера статичке стабилности (своди се на производ резерве статичке стабилности и градијента узгона)
– прираст момента пропињања по нападном углу, мера статичке стабилности (своди се на производ резерве статичке стабилности и градијента узгона) – пригушење момента пропињења, у зависности од брзине промене нападног угла, где је и време обездимензионисано с фактором
– пригушење момента пропињења, у зависности од брзине промене нападног угла, где је и време обездимензионисано с фактором
 – пригушење момента пропињења, у зависности од угаоне брзине пропињања
– пригушење момента пропињења, у зависности од угаоне брзине пропињања
 – ефикасност крмила висине
– ефикасност крмила висине – пригушење момента пропињења, у зависности од угаоне брзине отклона крмила хоризонталног репа.
– пригушење момента пропињења, у зависности од угаоне брзине отклона крмила хоризонталног репа.
У попречно-смерном кретању
|
Једначине равнотеже: |
|
У њиховим сабирцима се појављују деривативи стабилности (у бездимензионом облику):
 – прираст бочне силе, услед промене угла клизања,
– прираст бочне силе, услед промене угла клизања, – пригушни дериватив у ваљању, по угаоној брзини ваљања p,
– пригушни дериватив у ваљању, по угаоној брзини ваљања p, – унакрсни (спрегнути) дериватив, момент ваљања услед угаоне брзине скретања r,
– унакрсни (спрегнути) дериватив, момент ваљања услед угаоне брзине скретања r, – унакрсни дериватив, момент скретања услед угаоне брзине ваљања p,
– унакрсни дериватив, момент скретања услед угаоне брзине ваљања p,  – пригушни дериватив, момент скретања услед угаоне брзине скретања r,
– пригушни дериватив, момент скретања услед угаоне брзине скретања r, – ефикасност крилаца и
– ефикасност крилаца и – ефикасност крмила правца.
– ефикасност крмила правца.
Одређивање вредности дериватива
Аналитички
У почетној фази пројектовања, деривативи стабилности се одређују аналитички. То је практично прво приближавање у пројектовању, када се према доприносима појединих делова летелице одређују сабирци одеђеног дериватива. Ти доприноси се одређују прорачунски и на основу статистике познатих вредности за дотични део летелице. У том облику се користе за прелиминарне фазе пројектовања (првом приближавању), у првим симулацијама стабилности и управљивости летелице.
Експериментално, у аеротунелу
![]() За више информација видите чланак Експериментална аеродинамика .
За више информација видите чланак Експериментална аеродинамика .
У наредној фази пројекта летелице, када је познат прелиминарни њен облик и геометрија, тада се израђује њен физички модел у смањеној размери, за испитивање аеродинамике у аеротунелу. У оквиру тих испитивања је и мерење дериватива.
Мерење дериватива у аеротунелу се заснива на два принципа:
- метод поремећаја с типичним краткотрајним улазом, одговор слободне осцилације и
- метод дуготрајне принуде, крутим осцилацијама.
Код оба медода, снима се одговор и на основу његове анализе, издвајају се одговарајући деривативи. За ова мерења је потребно обезбедити одговарајуће мерне уређаје и мерну поставу. Неки од мерних уређаја су илустровани на приложеним сликама.
После ове експерименталне фазе одређују се вредности дериватива, за ниво прототипског развоја летелице.
Експериментално, у лету и развојном симулатору
![]() За више информација видите чланак Јурофајтер тајфун .
За више информација видите чланак Јурофајтер тајфун .
Следећа фаза је мерење у лету, при испитивању проротипа. Са уграђеном специјалном опремом и распоредом сензора (давача), снима се одговор авиона у лету на уведени типични поремећај. Математичком анализом тога одговора врши се идентификација аерединамичких параметара авиона, међу којима и дериватива.
Методе идентификације аеродинамичких параметара у лету заснивају се на добро познатим теоријским поставкама. Добијени резултати међусобно се усаглашавају на нивоу пројекта и користе се за ажурирање базе аеродинамичких података за дотичну летелицу, у свим конфигурацијама. Систем достиже захтевани стандард путем комплексног математичког моделирања динамике. Математички модел обухвата велики број спољних и унутрашњих параметара као што су статички и динамички притисак и температура ваздуха и њихов утицај на остале карактеристике. Затим, обухвата све конфигурације терета и све облике и брзине лета летелице. Квалитетан симулациони модел на прототипу омогућава прихватљив почетни софтвер команди лета без испитивања у лету. Добијени резултат се потврђује поузданошћу првих летова прототипова. Тај стандард је основа за даљи процес оптимизације система до коначног решења. Коначно решење се постиже методом упоређивања и сталног приближавања измереног одговора реалне летелице у лету и одговора коригованог модела на симулатору (види принцип на шеми испод). Тај принцип добијања квалитетног решења система може се назвати хибридна симулација, оптимизација методом постепеног приближавања.
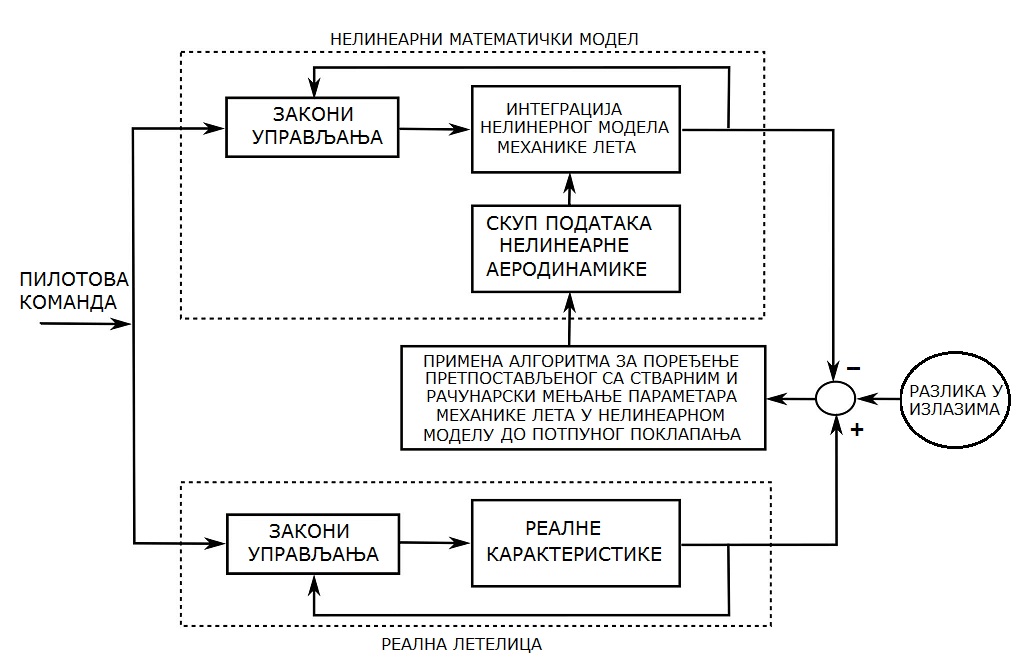
Блок шема система за идентификацију аеродинамичких карактеристика.

Методом узастопног приближавања долази се до задовољавајућег решења, успоставља се стандард летелице према важећим прописима, намени и захтевима пилота.
Аеродинамички отпор, може се разложити на чланове:![]()
Као што је прилаз за кретање дуж x осе, исто важи и за све степене слободе кретања летелице, дуж све три осе и за ротацију око њих.
У претходној једначини је дата зависност коефицијента отпора летелице са доприносом његовог раста услед промене нападног угла, отклона командне површне и пригушења због угаоне брзине ротације.
Градијенти аеродинамичких величина по променљивој су аеродинамички деривативи.
По истом принципу је идентификован и момент пропињања и остало:
![]()
Овом методом се успешно ажурирана база података нелинерног модела. Коришћени алгоритам грешке у одзиву реалне летелице и моделираног нелинеарног пакета своди разлику на минимум. Тиме је направљена реална основа за избор оптималних закона управљања летелицом, то јест, обезбеђена је „памет“ командном систему за ефикасно управљање с њом у целој анвелопи лета и у свим конфигурацијама.
Употреба
Линеаризација једначина кретања и симулација
Увођењем појмова дериватива (упрошћавањем само с првостепеним диференцирањем) извршена је линеаризација једначина кретања летелице. Симулација лета се заснива на тој линеаризацији једначина кретања летелица, што се заснива на претпоставци малих поремећаја. Та апроксимација задовољава потребе пројекта. У циљу аеродиначког пројектовања стабилности и управљивости летелице (укључујући и команде лета), симулацијом се креће од самог почетка пројекта, са почетним подацима за деривативе, масу и моменте инерције итд.
Симулација лета летелице омугућује пројекат развојног симулатора, чији је допринос описан у претходном поглављу и учила за обуку пилота на земљи (симулатор лета).
Симулатор лета за обуку пилота

Симулатори лета садрже различите врсте софтвера, у зависности од моделирања детаља и симулације радњи. Пројекти садрже варијанте у распону од симулације на лаптопу, на бази модела система ваздухоплова, до потпуне реплике кабине летелице за почетно упознавање, па до потпуно реалних симулација кабине, команди лета и осталих система ваздухоплова, за вишу и комплетну обуку пилота. Највиши ниво симулатора лета су за обуку пилота путничких авиона, а за обуку војних пилота је нешто нижи. На пример, међународни виши ниво захтева кретања платформе са кабином симулатора, у оквиру свих шест степени слободе и визуелни системом, у оквиру видљивости од 150 х 40, за целу популацију пилота. Војни симулатори лета имају више варијација у пројектовању.
Види још
- Аеродинамика
- Симулатор лета
- Експериментална аеродинамика
- Аеротунел
Извори
- Рендулић, Златко (1987.). Механика лета
- Perkins (1950.). Aeroplane Performance Stability and Control.
- Ненадовић, Мирослав (1972.). Стабилност и управљивост, други део.
- Longitudinal stability derivatives
- Lateral stability derivatives
- Mesure des derivees aerodynamiquesen eceouulement transonique et supersonique, Sherer, Publication N0 104, 1962.
- С. Пустиња, Студија дериватива попречно-смерне стабилности , Саопштење ВТИ-а, 1968.
- С. Пустиња, Мерење ефикасности крилаца авиона у аеротунелу , Војнотехнички гласник, 1970.
- Recent Experiences on Aerodynamic Parameter Identification for EUROFIGHTER at Alenia, British Aerospace, CASA and Daimler-Benz Aerospace
- Пилотажный тренажер самолета SSJ 100 готов к обучению российских пилотов
- ASME International The Link Flight Trainer
- U.S. Air Force Fact Sheet LINK TRAINER